ARMベースの32bitマイコンLPC1114FN28で、mbedの開発環境が使えるようになったとのことで試してみました。
詳細は「Getting started with mbed LPC1114」にて。
作成したプログラムの書き込み方法は上記サイトにも記載されている通りいくつかありますが、手順が簡単ということで、mbed経由でLPC1114FN28へ書き込む「イカ醤油ポッポ焼き」を使用してみました。
mbedでプロジェクトを作成した時にサンプルとして書かれているLチカプログラムをそのままコンパイルして書き込んでみました。
最初、mbed compilerの右上に表示されているプラットフォームがmbed LPC1768のままになっており、書き込みはできるものの動かなかったのですが、プラットフォームをLPC1114FN28に変更したら、動くようになりました。

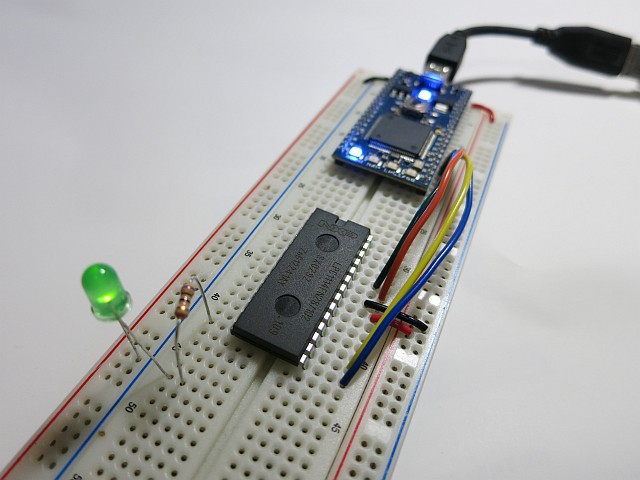
手前がLPC1114FN28で、奥が書き込みに使用したmbed LPC1768です。
mbed LPC1768とはピン数も異なりますし、いろいろ制約はあるようですが、これは簡単便利です。
LPC1114FN28はトランジスタ技術の2012年10月号に付録になったことで一時期話題になりました。DIPパッケージなので、ブレッドボードや電子工作で気軽に使用できます。2013年9月現在、秋月電子にて¥110で販売されており、コストパフォーマンスが抜群に良いので、注目していましたが、開発環境の敷居が高く、なかなか手を出せないでいました。mbedの開発環境が使えるようになったことでその問題もクリアし、すばらしく使えるマイコンに昇格したと思います。自分の中ではこれまでArduinoでやっていたことは今後はLPC1114FN28を使うことになりそうです。