
BeagleBoard-xMで行っていたようなカメラを使用した画像認識などもRaspberry Piで行ってみたいと考えており、CPU性能がどのぐらいなのか、興味があります。
そこで、ベンチマークでBeagleBoard-xMとの比較を行ってみました。
続きを読む [Raspberry Pi] ベンチマーク
[Raspberry Pi] 無線LAN接続
無線LANでのネットワーク接続に挑戦しました。
続きを読む [Raspberry Pi] 無線LAN接続
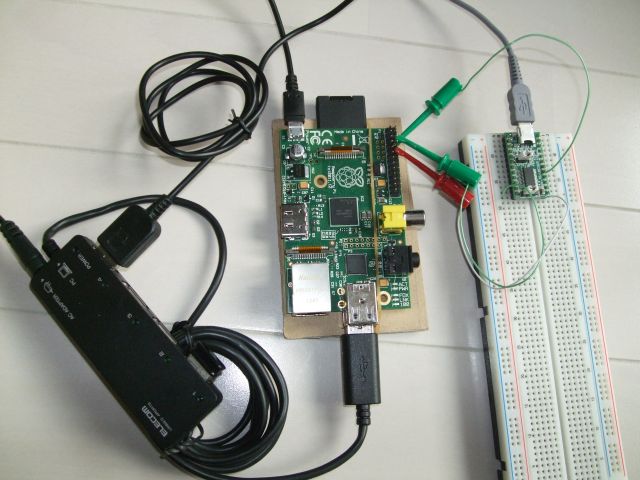
[Raspberry Pi] Raspberry Piを購入しました
遅ればせながら話題のRaspberryPiを購入してみました。
BeagleBoard-xMと被るので、これまで手を出していませんでしたが、情報が豊富になってきたのと、何といってもBeagleBoard-xMよりもだいぶ安いので、単機能な組み込み機器にも贅沢に使用できそうということで、こちらに浮気しちゃおうかと。
というわけで、BeagleBoard-xMと比較しながら使ってみたいと思います。

購入
RSオンラインにて購入しました。
RSオンラインは届くのが遅いという噂でしたが、3/4に発注して3/15に届いたので、思ったよりも早かったです。
値段は本体が¥2,950、送料が¥460、消費税が¥171で、合計¥3,581でした。
BeagleBoard-xMは¥14,305(2013/3/20現在)(消費税は別途必要かも)なので、約1/4でだいぶ安いです。
BeagleBoard-xMとの比較
簡単にスペックを比較してみます。
| Raspberry Pi Model B | BeagleBoard-xM | |
|---|---|---|
| CPU | Broadcom BCM2835 (700MHz ARMv6) |
TI DM3730 1.0GHz (ARM Cortex-A8) (Ubuntuでは800MHzまでに制限されているようです) |
| メモリ | 512MB (2012/10/15以降) | 512MB |
| ネットワーク | 100M Ethernet | 100M Ethernet |
| USB | 2ポート | 4ポート |
| 電源 | 5V | 5V |
| 基盤サイズ | 85.60×53.98[mm] | 85.6×85.1[mm] |
CPUのクロックはそれ程変わりませんが、ARMv6とCortex-A8でどのぐらい差があるのか気になります。また、Raspberry Piはクロックアップもできるということです。CPU性能については今後ベンチマークなどで比較してみたいと思います。
組み込み用途を考えると、Raspberry Piの方が若干サイズが小さいのはメリットですが、Raspberry PiはUSBの電流制限が厳しいようで、USBカメラやWifiをつける場合はセルフパワーのUSB HUBが必須になるところは弱点ですね。
なお、BeagleBoardの下位機種でBeagleBoneというものもありますが、メモリが256MBで、値段が約¥8,000なので、Raspberry Piに比べるとあまり興味が持てません。
OS(Raspbian)の書き込みと起動
まずはSDカードにOSのイメージを書き込みます。ネット上に情報がたくさんあるので助かります。
手元にキーボードがないので、以下を参考に秋月電子のAE-UM232Rを使用してシリアルコンソール接続で起動してみました。
秋月電子のAE-UM232Rを使用する場合、J1のジャンパの1-2間をショートして、で3.3Vに設定するのを忘れないように。
参考サイト:
http://raspberrylife.wordpress.com/2013/02/27/%E3%82%B7%E3%83%AA%E3%82%A2%E3%83%AB%E3%82%B3%E3%83%B3%E3%82%BD%E3%83%BC%E3%83%AB/
http://elinux.org/RPi_Low-level_peripherals
あ、OSはRaspbian wheezy(2013-02-09)を使用しています。
GPIOポートの電圧が3.3Vなのが良いですね。BeagleBoard-xMは1.8VだったのでGPIOを使う気がしませんでしたが。
また、BeagleBoard-xMは壊すのが怖いというのもありましたが、RaspberryPiは比較的安いので少し安心です。
起動までは特に問題もなくさっくり来ました。

ポータブル太陽光発電システム
ポータブル太陽光発電システム(?)を作成しました。
コンパクトなので、停電時だけでなくキャンプなどでも使用できます。
システム構成
太陽電池パネル、バッテリー、充電コントローラー、自作負荷コントローラー、シガーソケット


おもな部品
| 型番 | スペック | 買った店 | 購入時価格 | |
|---|---|---|---|---|
| 太陽電池パネル | OSSM-SF0012 | 12W | 秋月 | ¥4,950 |
| バッテリー | WP8-12 | 12V 8Ah | 秋月 | ¥2,200 |
| 充電コントローラー | CM04-2.1 | 12V 4A | 秋月 | ¥1,400 |
| 負荷コントローラー | 自作(Arduino) | 部品代¥500ぐらい |
部品代は合計、¥10,000ぐらいです。
バッテリーが過放電にならないための負荷コントローラーはArduinoを使用して自作しました。バッテリーの電圧が11Vを切ったらシステムの電源が切れるようになっています。(将来的には充電電流や負荷電流のモニタリングも行いたいと思い、Arduinoで自作しました。)
利用中の光景

・USB5V出力の変換機経由でタブレットを充電する
・DC12VをAV100Vに変換するインバーター経由で、小型扇風機を回す
・DC12V用LEDライトを点灯する
上記の負荷で何分動かせるかは試していませんが、バッテリーの容量(12V 8Ah)から計算すると、フル充電からだと2~3時間ぐらい使用できることになります。
本格的な太陽光発電システムに比べると出力はわずかですが、非常時のために無いよりは良いでしょう。
また、天気の良い日に1日充電してもフル充電にならなく、発電の大変さがわかり、使っていない部屋の電灯をこまめに消すようになるなど、エコの意識が高まる効果もありました(笑)
ブログ移転の御挨拶
はてなダイアリーから、こちら(さくらブログ)に引っ越してきました。
これからもよろしくお願いします。
また、このたび組織名をSTUDIO-KからSTUDIO-K Infinityに変更しました。
これを機にドメインを取得しましたので、今後は移転したとしてもアドレスは変わらないようにできると思います。
過去の記事はコピーしましたが、なぜかコメントの多くがコピーされませんでした。(はてな側からのエクスポートファイルに含まれていませんでした。)また、さくらブログ側もMT形式ファイルのインポートで記事の投稿時刻が00:10:20のように00時台だとインポートした日付と時刻に変わってしまう不具合があるようです。こちらは手動で修正しました。