ChatGPT APIを使用すると、返答が返ってくるまで数十秒待たされることがあります。
Web版のChatGPTでも返答の全文が返ってくるまでには時間がかかりますが、数文字ずつ逐次表示されるため、待たされる感覚は少なくて済みます。
ChatGPT APIでも返答を逐次受け取ることができます。この記事では、その方法について説明します。

ChatGPT APIを使用すると、返答が返ってくるまで数十秒待たされることがあります。
Web版のChatGPTでも返答の全文が返ってくるまでには時間がかかりますが、数文字ずつ逐次表示されるため、待たされる感覚は少なくて済みます。
ChatGPT APIでも返答を逐次受け取ることができます。この記事では、その方法について説明します。
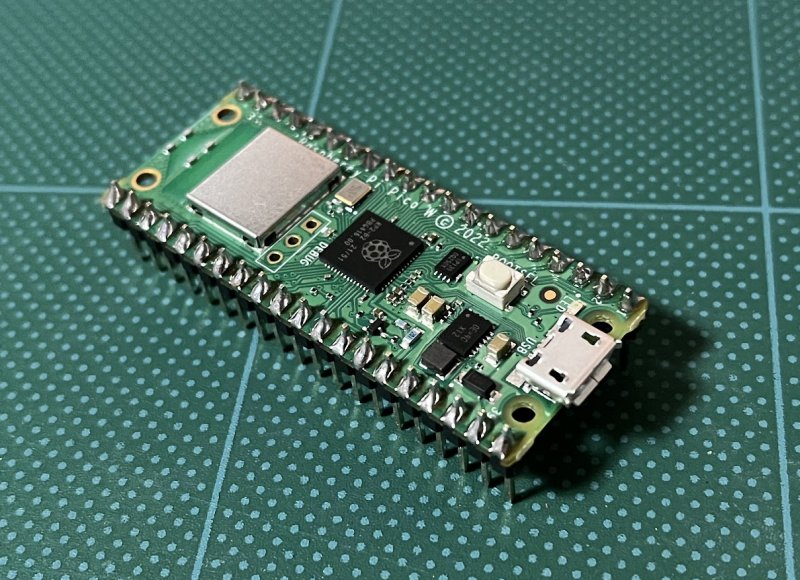
2023年3月27日に、Raspberry Pi Pico W (Wifi/Bluetooth対応版)が日本でもようやく販売開始されました。
Raspberry Pi Pico Wは海外では2022年6月に販売開始されており、ハード的にはWifiとBluetoothに対応していましたが、当初はBluetoothはSDKが対応しておらず、Wifiのみ利用できる状況でした。
2023年2月にBluetooth対応のSDKがリリースされ、Arduino(EarlePhilhower版)でもBluetoothが利用できるようになっています。
なお、本記事はArduino公式版ではなくEarlePhilhower版を前提に記述しています。
今回はArduino開発環境で、Pico WとWindows PCをBluetooth(シリアル:SPP)接続してみます。
有線シリアル通信のプログラムを簡単に無線化できますよ!
続きを読む Raspberry Pi Pico W でPCとBluetooth(シリアル)接続する
Raspberry Pi PicoとPico Wの開発にはMicroPythonを使うことが多いと思いますが、Arduino開発環境も使用することができます。
Arduinoの大量にある過去の資産が使えて、開発が捗ります。
本サイトではRaspberry Pi Pico+Arduinoの記事をいくつか掲載していますが、その前提となるArduino開発環境のセットアップについてのメモを残しておきます。
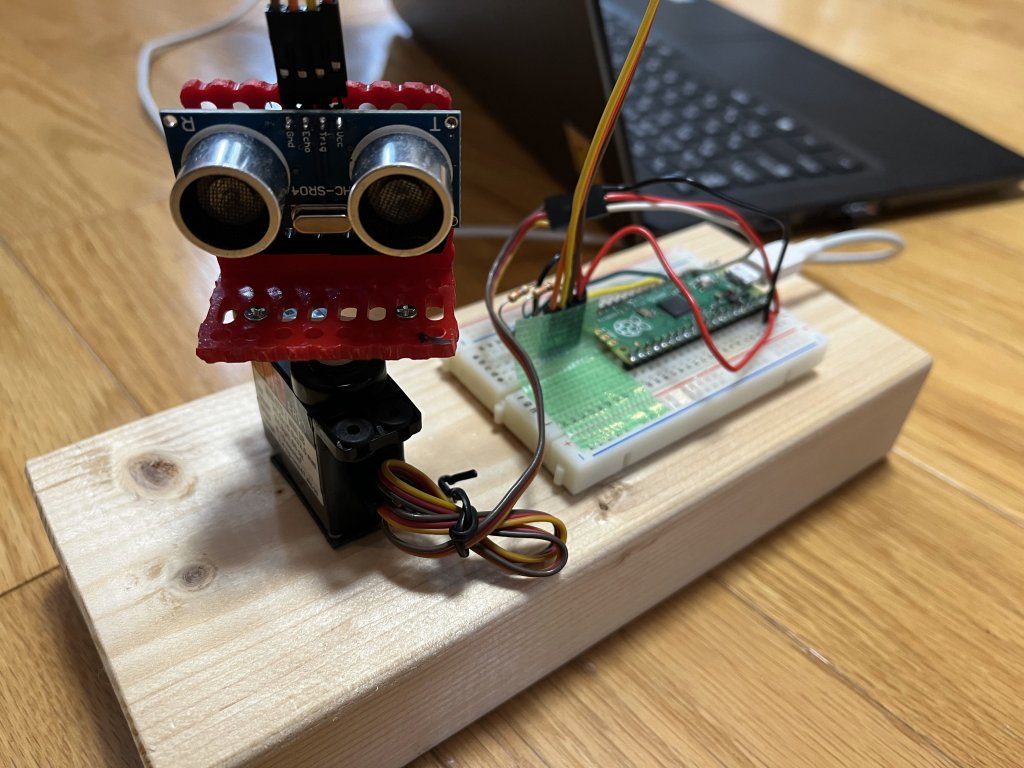
前回の記事「MPU6050 + Raspberry Pi Pico(Arduino) -> PCで3Dのキューブを回転表示」の続きです。
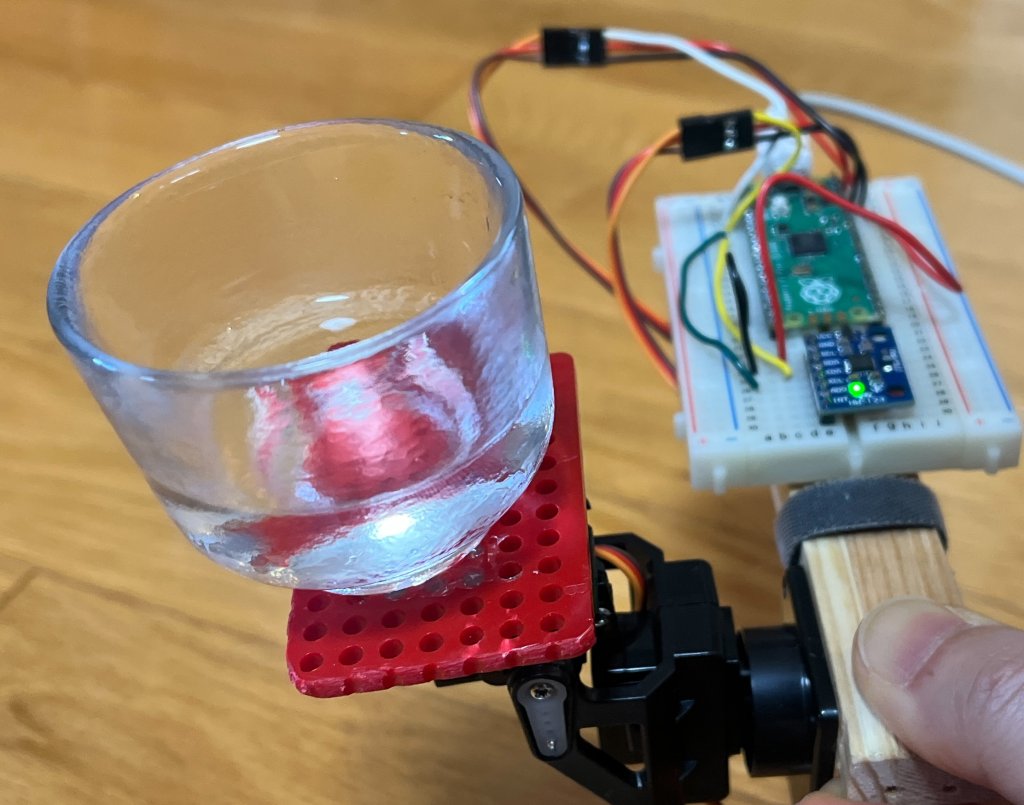
前回はジャイロ・加速度センサー(MPU6050)の値を読み込んでPC上で3Dのキューブを回転表示しましたが、
今回はサーボ2つを使用して、「常に水平になる台」を作成してみました。