
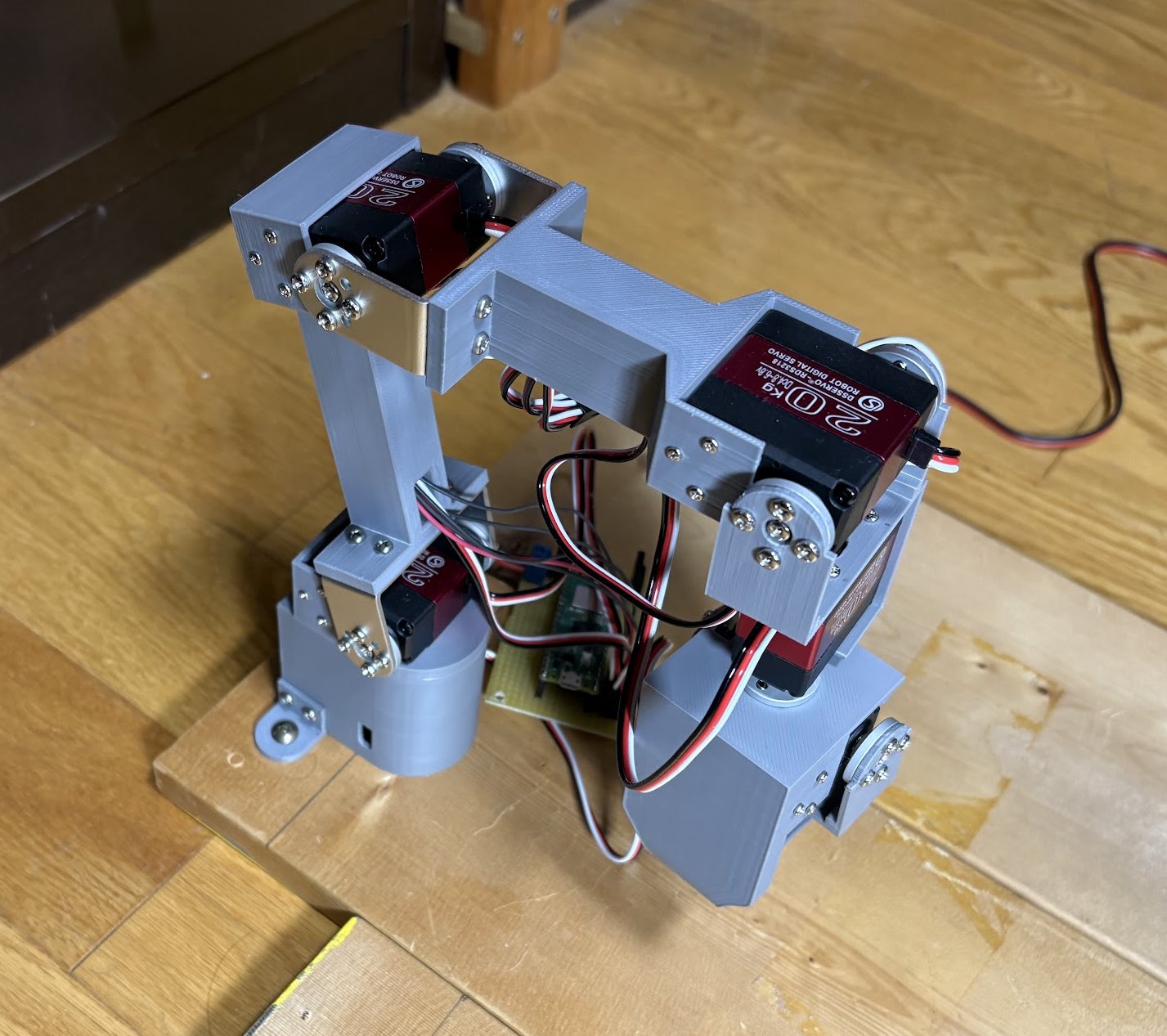
ロボットアームを作りました!
以前作成したルンバを台車にしたアシスタントロボに取り付けます。
安価なサーボを使用して、構造部分は3Dプリンターで作成したことで、部品代は1.1万円以下の低コストで作成できました。
ハンド部分を合わせて6軸になります。
1.5Kg以上のものを持ち上げることができます。
紹介動画
【動画の内容】
- 設計・制作
- 消しゴムを運ぶ(動作確認)
- URDFファイルの作成
- Genesisでのシミュレーション
- GenesisのIK機能でハンドを操作
- 実機にてGenesisのIK機能でハンドを操作
- Joypadで動かせるようにした
- Joypadでクレーンゲーム
- RealSense(深度センサー)を使用して画像認識でクレーンゲーム
- E.T.の有名なシーンを再現(Yolo11)
- 持ち上げられる重量の計測
- PythonのpyikでIKを計算
- アシスタントロボへの取り付けと動作
以上、盛りだくさんなので、ぜひ見てみてください!
構成
✅マイコンはRaspberry Pi Pico Wを使用し、Arduino開発環境でプログラムを作成しました。サーボのコントロールはPicoのPWM機能を使用します(Pico SDKをArduino環境から直接使用します)。
なお、Pico/Pico WはPWMが最大16チャンネルまで使用できますのでサーボは16個までコントロールできます。
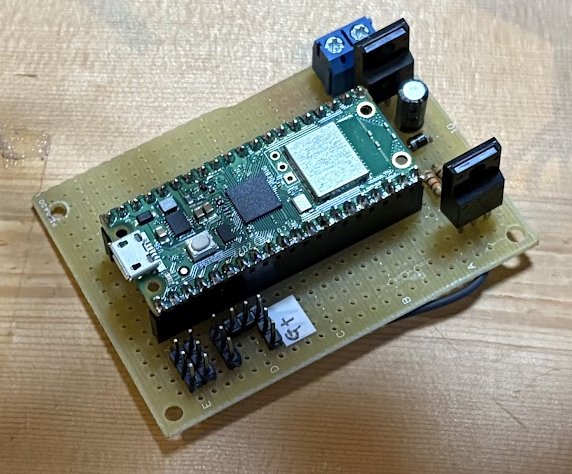
✅コントロールはPC上のPythonプログラムからWiFi経由で行います。
✅サーボにはRDS3218を使用することで、低コストで作成することができました。
シャフトが両側から出ていてブラケット付きのものを使用しました。また、180°回転のタイプと270°回転のタイプがあるようです。私は270°の方を使用しましたが180°の方が良かったかもです。Amazonでは↓で購入できます。
RDS3218 20KG デュアル シャフト

パーツリスト
| 単価 | 数量 | 金額 | |
|---|---|---|---|
| サーボRDS3218 | 1,280 | 6 | 7,680 |
| Raspberry Pi Pico W | 1,419 | 1 | 1,419 |
| NchパワーMOSFET 60V25A 2SK2232 または同等品 | 100 | 1 | 100 |
| 三端子レギュレーター 3.3V1A TA48033S または同等品 | 120 | 1 | 120 |
| 積層セラミックコンデンサー 0.1μF | 25 | 1 | 25 |
| 電解コンデンサ 33μF | 10 | 1 | 10 |
| ショットキーダイオード 1S3 or 1S4 | 20 | 1 | 20 |
| 抵抗 1KΩ | 10 | 1 | 10 |
| ピンヘッダ (40P) | 35 | 2 | 70 |
| 分割ピンソケット (40P) | 80 | 2 | 160 |
| ターミナルブロック 2P | 35 | 1 | 35 |
| ユニバーサル基板 (72x47mm) | 100 | 1 | 100 |
| ワイヤ | 適量 | 100 | |
| 3Dプリンタ フィラメント | 適量 | 500 | |
| ネジ | 適量 | 200 | |
| 合計 | 10,549 |
基板回路図
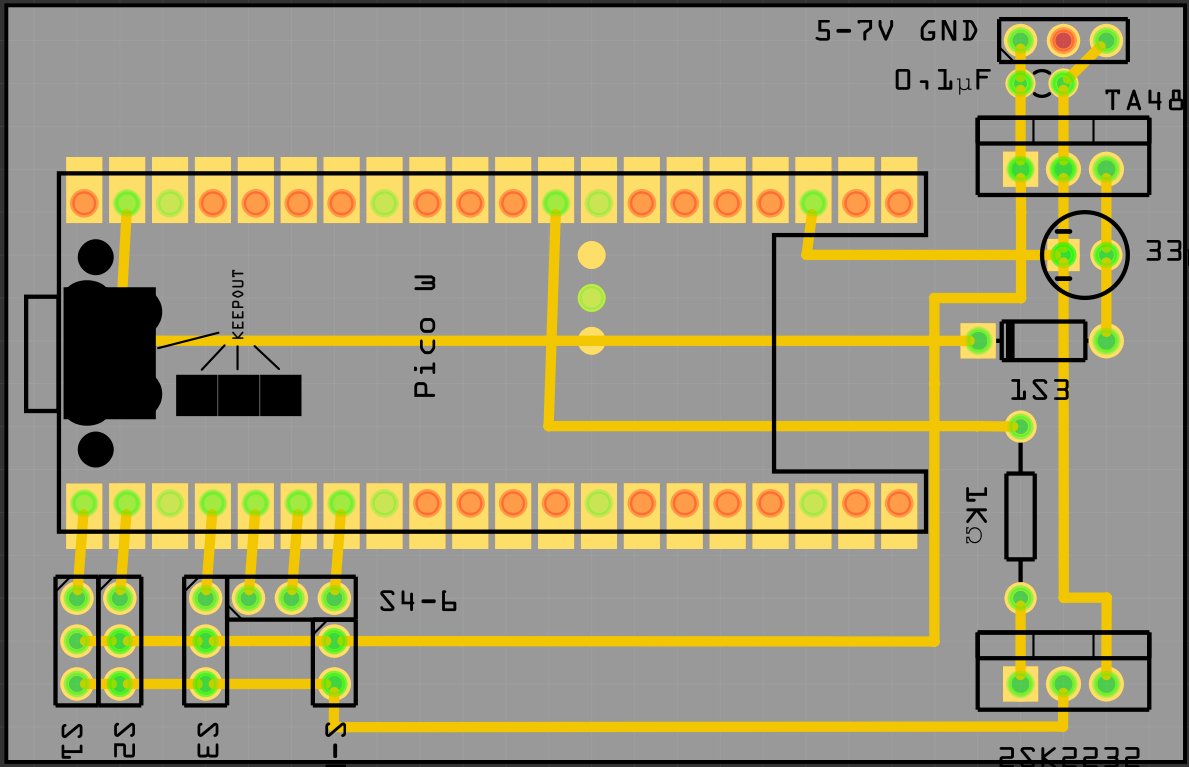
※右上の三端子レギュレーターは電源電圧が5.5V以下であればPicoのレギュレーターが使用できるので不要です。ダイオードを挟んで、39pin(VSYS)に接続します。
※右下のNchFETはPicoからサーボの電源をOFFにできるようにするために設けていますが、なくても良いです。
アームの3Dプリンターデータ(STL形式)
後日公開予定です。
ロボットアームのURDFファイル
URDFファイルはロボットの構造を定義したファイルで、シミュレーションや機械学習に使用します。
URDFファイルの作成にはURDF kitchenを使わせていただきました。
https://github.com/Ninagawa123/URDF_kitchen
URDFファイルは後日公開予定です。
プログラム
後日公開予定です。
アシスタントロボに取り付けたところ
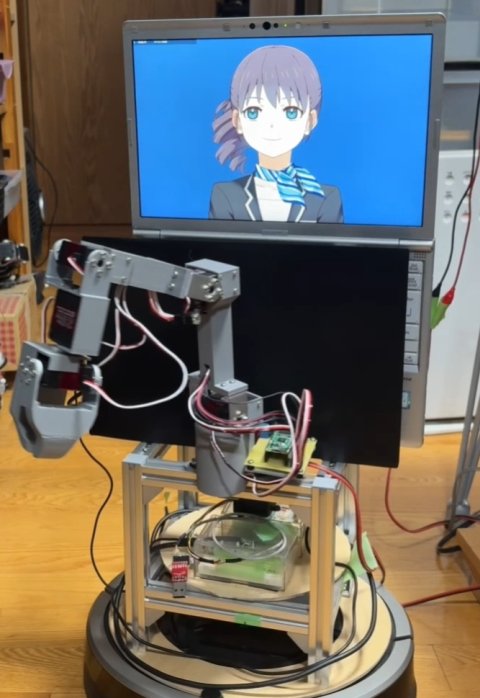
上のYouTube動画の最後の方で動いているところを見ることができます。

20kgのサーボで1.5kgも持ち上げられるとは思ってなかったです。
実際はグリッパーを除いて6軸のロボットが多く、そうなるとモーメントの分ペイロードが小さくなるのかもしれません。
サーボモーターの分解能的に、後付けで減速機を組み合わせれば精密な動きができるのでは無いかと思っています。
単純計算ですが、根元のサーボから水平距離で12cmぐらいなので、20kg/12=1.66kgになるので、こんなもんかなと思いました