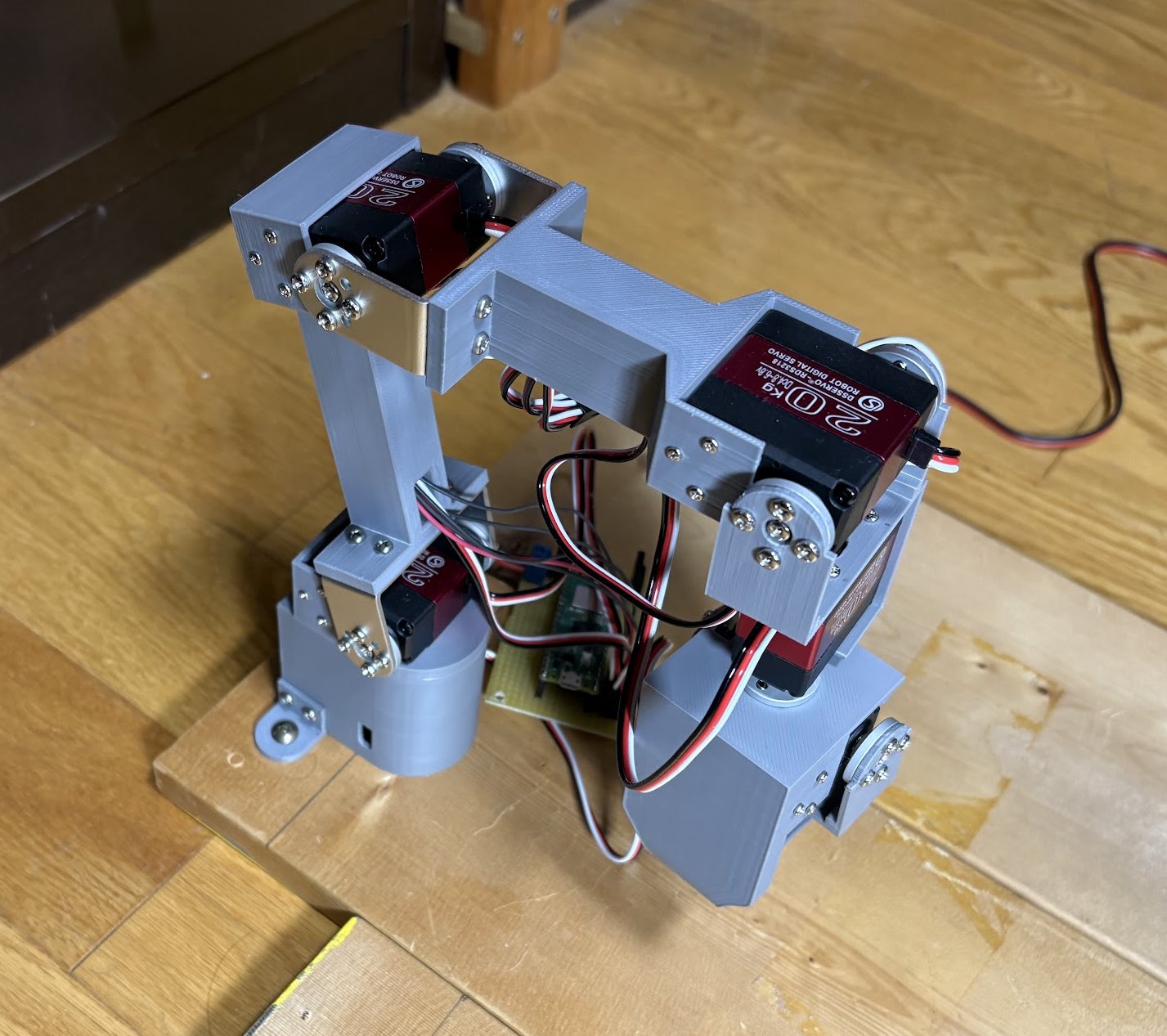
ロボットアームを作りました!

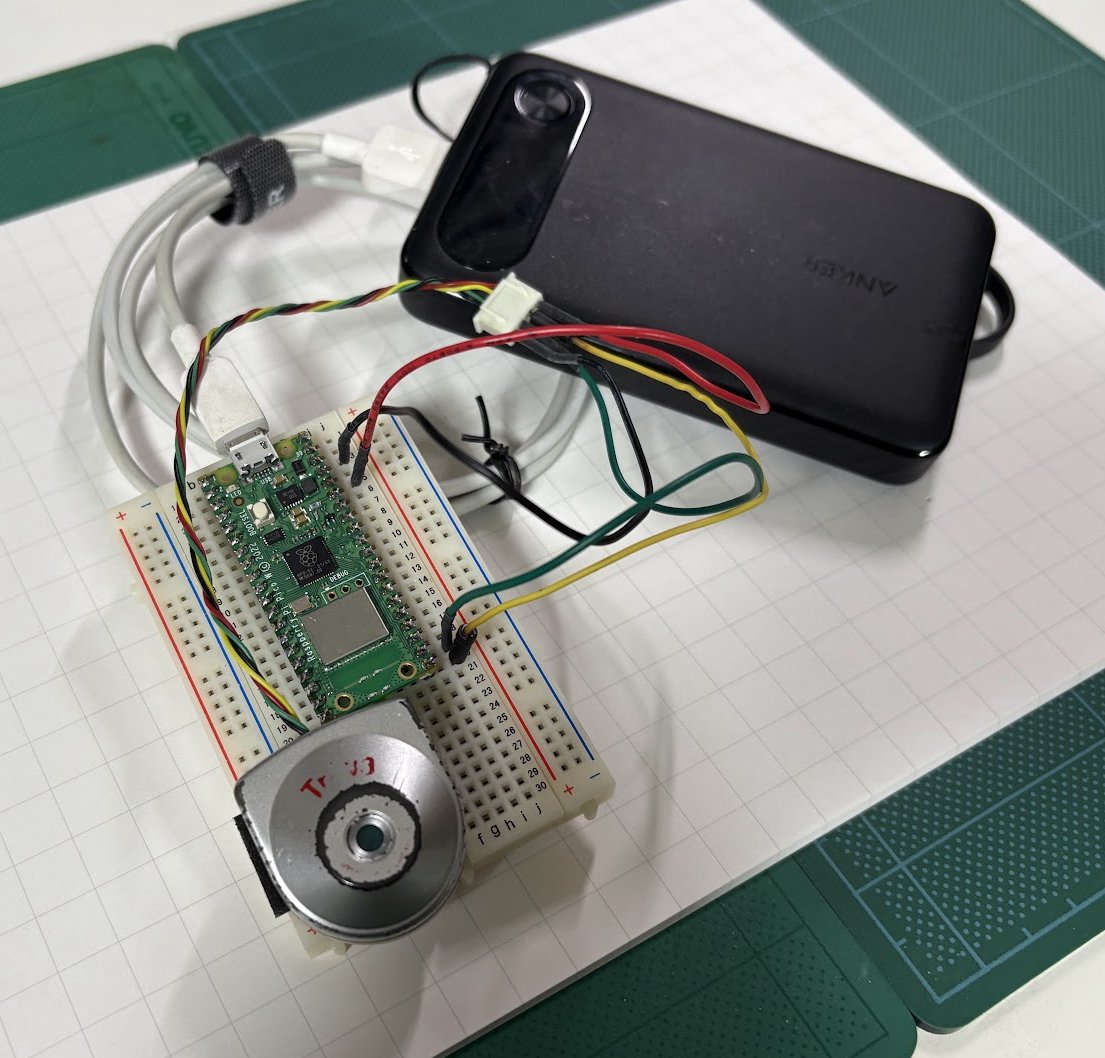
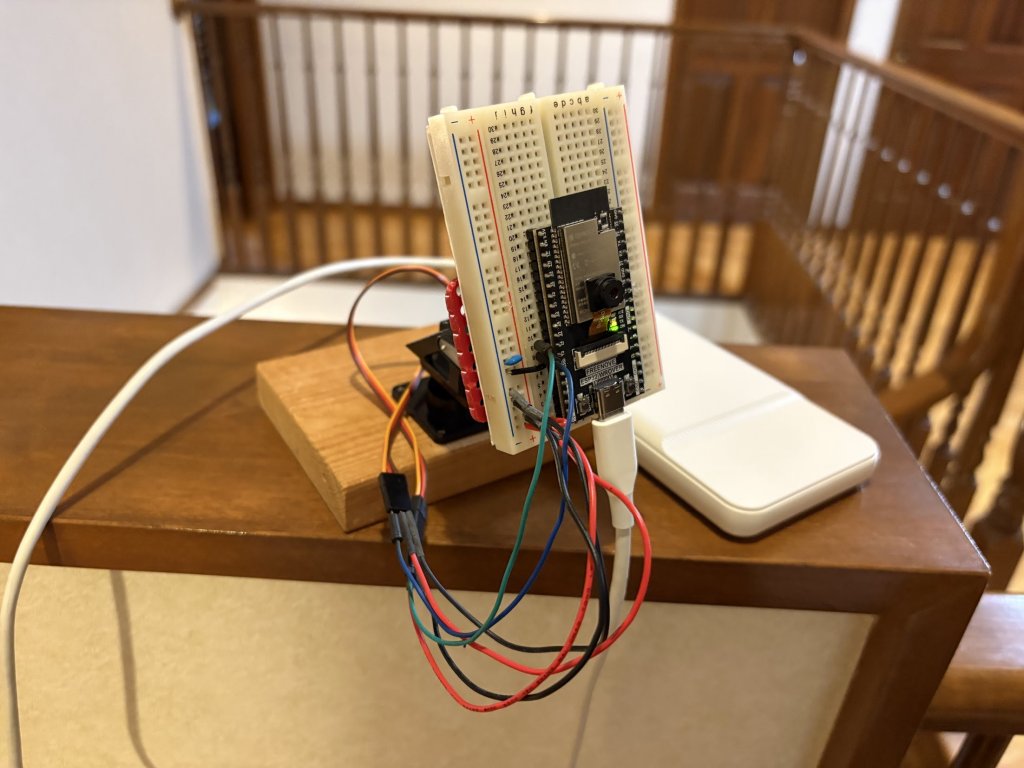
昔のPHS用カメラ「Treva(トレバ)」をRaspberry Pi Pico WにつないでWiFiカメラを作りました‼
▲の写真のようにバッテリーをつなげばケーブルレスで運用可能‼
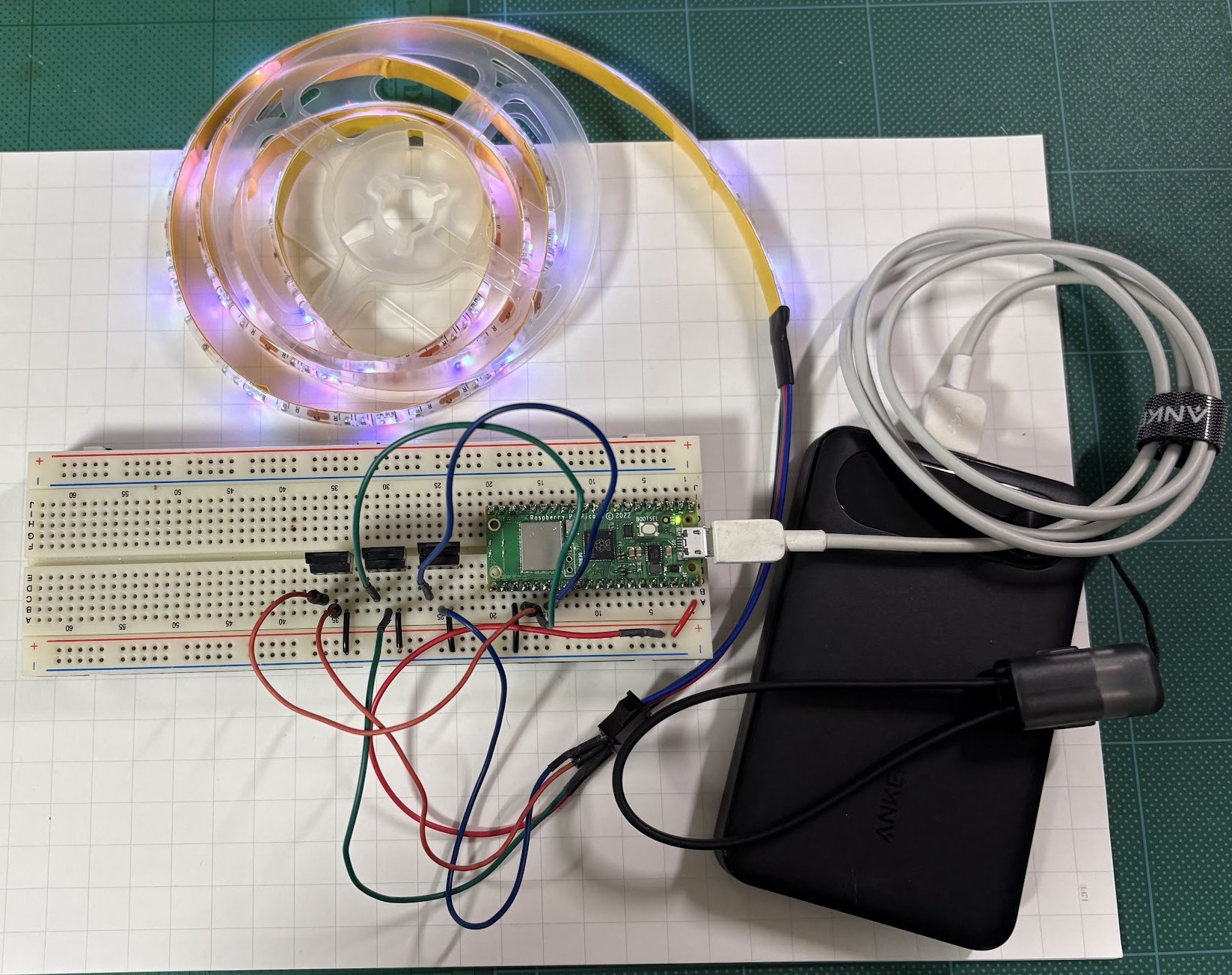
ダイソーの¥550 フルカラーテープLED と Raspberry Pi Pico WでPCのPythonから通信(UDP)で自由に色を変えられるようにしてみました‼
何かと同期して光らせられますね‼

Raspberry Pi Pico W で WiFi UDP通信するサンプルプログラムを作成しました。
PC側のPythonプログラムとUDPで送受信します。